
Ocean Weaver
Entrant Company
Ocean Weaver Design Team
Category
Product Design - Sustainable Living / Environmental Preservation
Client's Name
Country / Region
United States
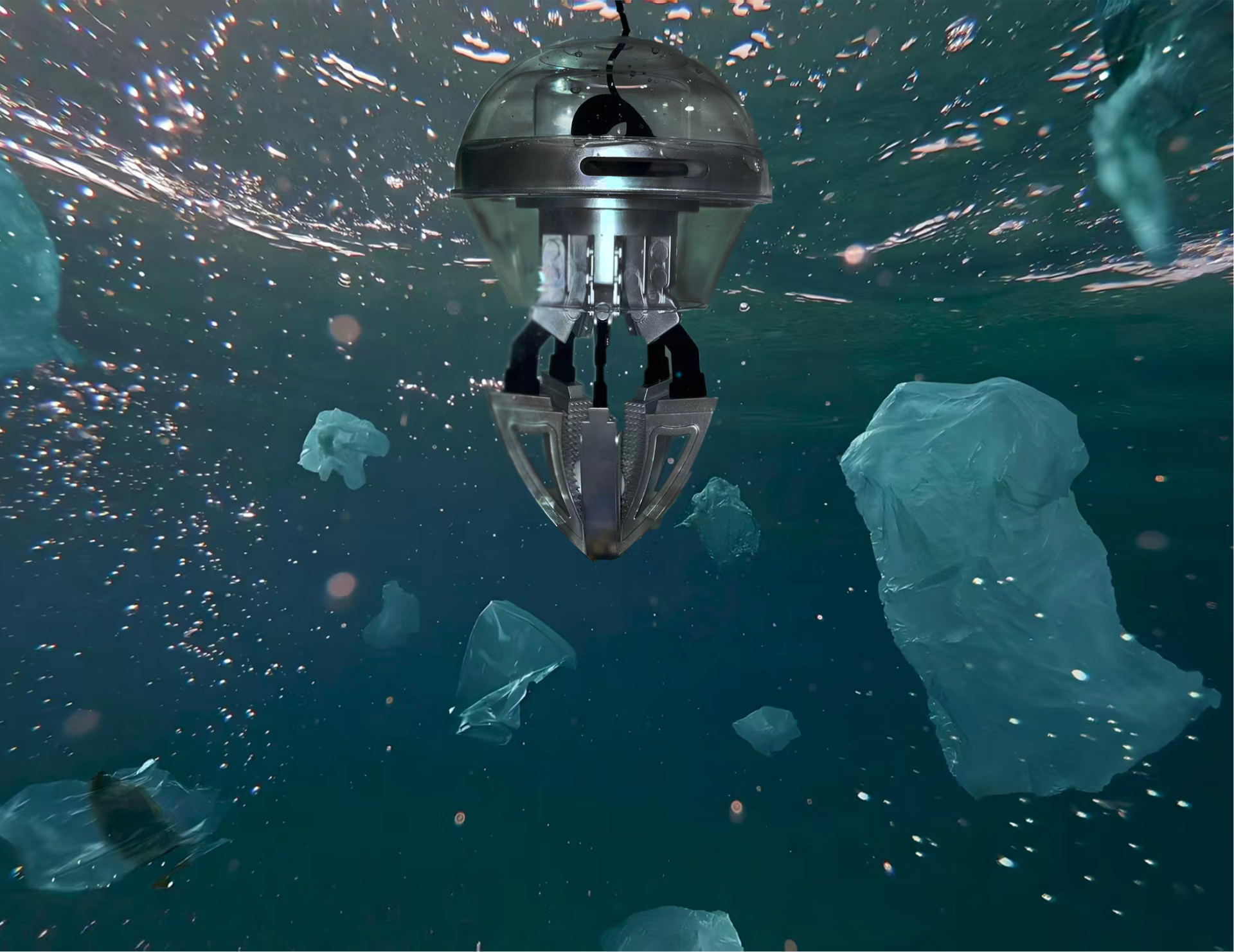
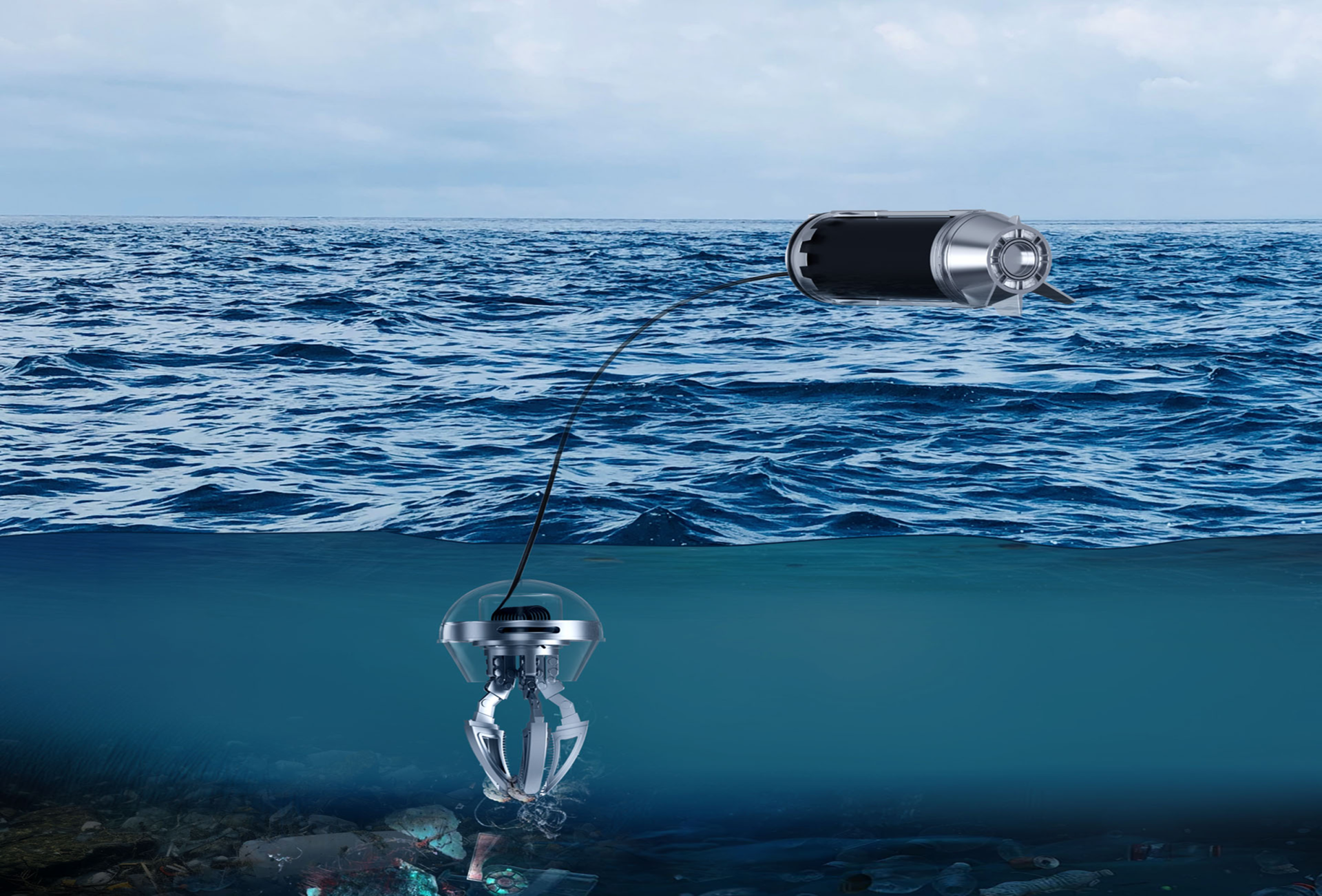
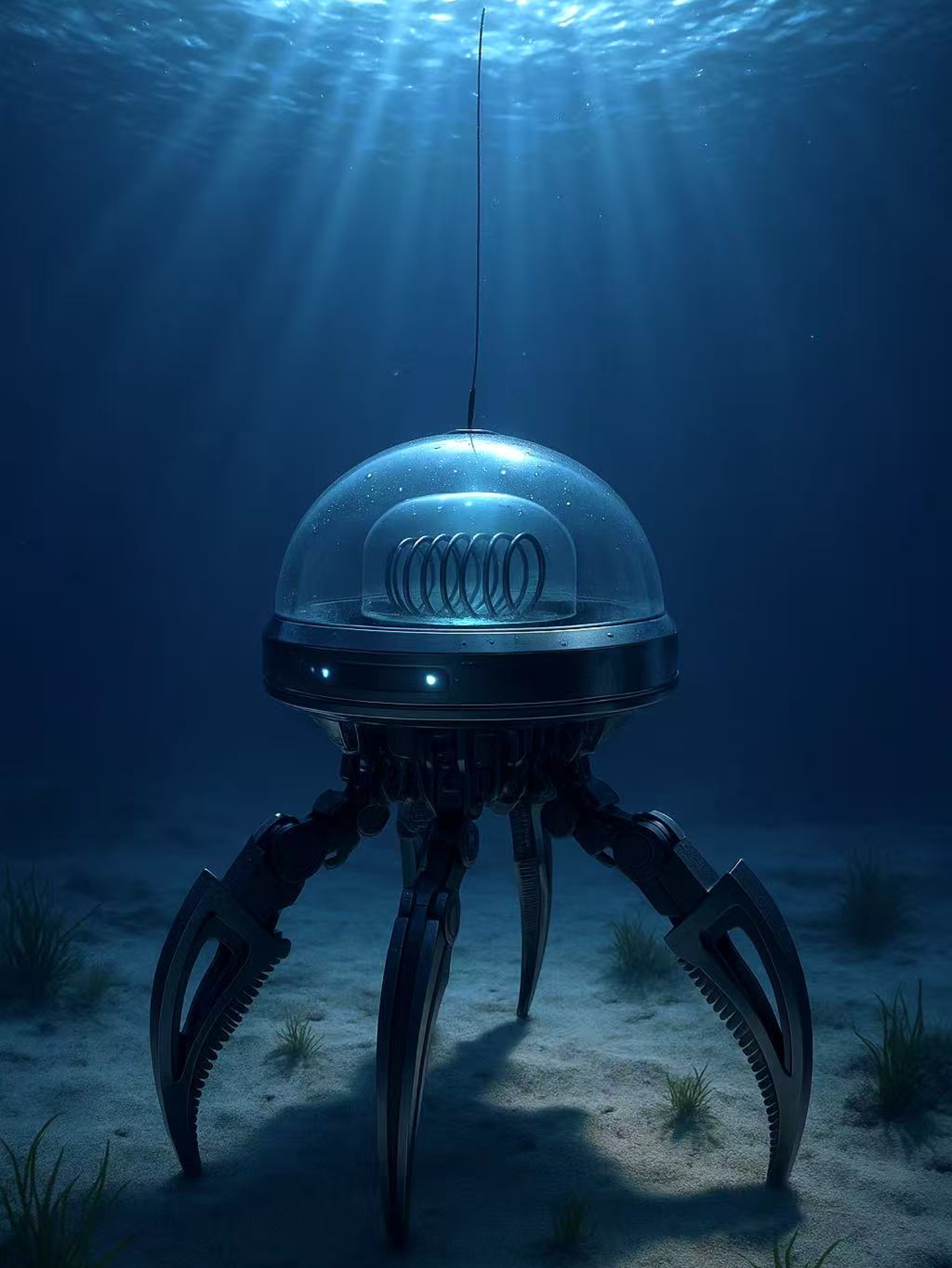
To address ocean plastic pollution, this project proposes a flexible underwater robotic arm inspired by octopus tentacles. Utilizing a liquid-metal alloy skeleton and hydrogel skin for adaptive shape-morphing, it features a stiffness-adjustable grip that switches between soft and rigid modes. This design aims to safely and efficiently clean up waste that is difficult to handle with conventional methods.
Through its biomimetic flexible structure and intelligent operation, this product has attracted users including government environmental agencies, international non-governmental organisations, and shipping enterprises. It not only operates safely in complex underwater environments without harming marine life but also efficiently handles pollutants like microplastics and ghost fishing gear that are difficult to remove by conventional means. This fulfils market demand for precise, low-cost, and integrable marine debris removal solutions.
This product features controllable switching between rigid and flexible modes, enabling gentle retrieval of irregular objects such as microplastics and discarded fishing nets while maintaining rigid stability during recovery to effectively prevent harm to marine life. It supports modular integration with various underwater platforms, enabling automated operation to execute cleanup tasks without complex controls. Through precise, adaptive and ecologically sound operation, it assists users in efficiently and safely removing underwater pollutants, reducing operational costs and enhancing environmental outcomes.

Credits

Entrant Company
HZS Design Holding Company Limited
Category
Architectural Design - Public Spaces

Entrant Company
Dilodesigner
Category
Product Design - Workplace & Office
Entrant Company
AKAMEDIA JAPAN INC.
Category
Conceptual Design - Education

Entrant Company
Miles Wang
Category
Furniture Design - Bedding